�S���҇��_���ИI�İlչ���_���O�������c����Ľ�܉���_�����a�Ԅӻ��̶ȵ��Mһ����ߣ����_�����a�����ϼ��gҲ�����Խ��Խ�ߵ�Ҫ���ԝM���c�_���O������ס�
1 Ƕ��ʽ���؛_���Ͷ�ϵ�y
����Ŀǰ�Ԅ�����ϵ�y���ڵ�һЩ���㣬�����һ�N����ARM��Ƕ��ʽ���؛_������ϵ�y���Ĵ��w�Ͽ���Ƕ��ʽӋ��Cϵ�y��Ҫ�������c��
1)�����ԡ�Ƕ��ʽϵ�yͨ���������ض����ã����Ƕ��ʽCPU���ض��Ñ�Ⱥ�OӋ��ϵ�y�У�ͨ�����е��ġ��w�eС�����ɶȸߵ����c��
2)���r푑�������Ƕ��ʽϵ�y�Ķ��x��������ij�N���g�^�̵ĺ���̎���h�����M�㼼�g�^�̵ĕr��Ҫ����Ȼ���Ќ��r̎�������ԡ�
3)���ѿɿ���Ƕ��ʽ�aƷ��ʹ���ˆT�����Ӌ��C���I��ʿ��ʹ�íh���l���^�鐺�ӣ��佡���Լ��ɿ�����ԓaƷ�ı�l����
2 �ŷ�늙C���x��
ϵ�y����ֱ��늙C����X��y�S�M�o���ڙC���M�oϵ�y�У�����ֱ��늄әC�˽����cԭ���D늄әC���ӵĸ���^�e��ȡ���ˏ�늄әC�������_���ϰ壩֮�g��һ�ЙCе���g�ӭh�����љC���M�o����朵��L�ȿs�̞��㣨�@�N���ӷ�ʽ���Q�顰����ӡ������@�N������ӡ���ʽ��������ԭ���D늄әC�ӷ�ʽ�o���_��������ָ�˺̓��c
1)����푑�������ϵ�y��ֱ��ȡ����һЩ푑��r�g�����^��ęCе���Ӽ�����z�ܵȣ���ʹ�����]�h����ϵ�y�ӑB푑����ܴ����ߣ����������`����ݡ�
2)�߾��ȡ�ֱ����ϵ�yȡ�������ڽz�ܵșCе�C���a���Ă����g϶���`��p���˲��a�\�������ϵ�y�����ĸ�ۙ�`�ͨ�^ֱ��λ�Ùz�y�������ƣ����ɴ����ߙC���Ķ�λ���ȡ�
3)�߂��ӄ��ȡ����ڡ�ֱ���ӡ������ˆ��ӡ�׃�ٺ͓Q��r�����g���ӭh���ď���׃�Ρ�Ħ��ĥ�p�ͷ����g϶��ɵ��\�Ӝ���F��ͬ�rҲ���������ӄ��ȡ�
4)�ٶȿ졢�Ӝp���^�̶̡�ֱ��늄әC���ڙC���M�o���У�Ҫ�M���䳬���������������M�o�ٶȣ�Ҫ���_60��100 m/min����ߣ��Ǜ]��ͬ�}�ġ�Ҳ��������������ӡ��ĸ���푑��ԣ�ʹ��ӡ��p���^�̴��s�̣����Ԍ��F���ӕr˲�g�_�����٣����Ҹ����\�Еr����˲�gֹͣ���ɫ@���^�ߵļ��ٶȣ�һ����_2һ1Og�����L��z�܂��ӵĸ�����ٶ�һ��ֻ��0.1һ0. 5g��
5)�г��L�Ȳ������ơ��ڌ�܉��ͨ�^��ֱ������C���Ϳ��ԟo�����L���г��L�ȡ�
6)�\�Ӱ��o�����͡�����ȡ���˂��ӽz�ܵȲ����ęCеĦ�����Ҍ�܉�ֿɲ��ÝL�ӌ�܉��ʼn|�Ҹ���܉���o�Cе���|�������\�ӕr������͡�
7)Ч�ʸߡ����ڟo���g���ӭh���������˙CеĦ���r�������p�ģ�����Ч�ʴ����ߡ�
3 ϵ��Ӳ���OӋ
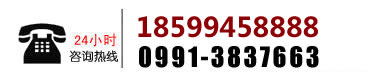
���M���ϵ�yӲ���Y����D��Dl��ʾ����λ�C��PC�C��ͨ�^�����c��λ�CARMͨ�ţ���λ�C�����|������ֱ��늙C��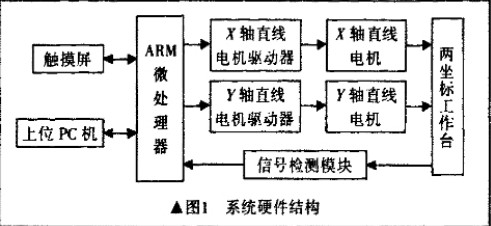
���Ʋ��ֲ��õͳɱ��������ܡ����ĵ�̎����S3C2410����Ŀ�����������һ��32λRISC�ܘ��ĵͳɱ��������ܡ����Ļ�̎���������l��200MHz���Ⱥ�1��LCD��������֧��STN�͡�rFT�����|������Һ���@ʾ������SDRAM��������3��ͨ����ART��4��ͨ����DMA��4������PWM���ܵ�Ӌ�r����1���Ȳ��r犡�8ͨ����10λADC���|�����ӿڵȡ�S3C24J O�̼��ɶȺ����ˑ���ϵ�yӲ���OӋ������ˑ���ϵ�y�ɿ��Ժͷ����ԡ������������|�����������Ԫ���˙C����ֱ�^���㡢�����Ѻá��������Σ����F�����Ԅӡ��քӡ����ӡ�ֹͣ�Ȳ����Լ�һЩϵ�y�������O�á��\�Ӳ���X��y�S���x��Kollmorgen��˾DDLϵ�Пo�Fоʽ��ֱ���ŷ�늙C��늙C�Ķ��Ӳ���U�ͽY�����D�Ӳ��ßo�Fоʽ�OӋ��ֱ��늙C�Y�����Σ�������ȫ�ɿ���ͬ�rʡȥ�����g�Cе�h������λ���ȱ��^�ߣ�λ�Ùz�yԪ���x�ù�ųߣ��z�y�����^�ߡ�����ϵ�y�����]�h���ƣ���������ϵ�y���ȡ�
4 ϵ�yܛ���OӋ
ϵ�yܛ����Ҫ������λ�Cܛ������λ�Cܛ���ɲ��֣���D2��ʾ����λ�Cܛ����Ҫؓ؟NC���a���ɡ����g�Լ��c��λ�C������PC�Cͨ�ţ���λ�Cܛ����Ҫ����5��ģ�K����������ģ�K������ͨ��ģ�K���\�ӿ���ģ�K���˙C����ģ�K����̎��ģ�K��1��
����ܛ��ϵ�y�У���λ�Cܛ��������ϵ�y���ġ��҂��x���x��Դ�a���_������ֲ�Ժá������W��Linux���r����ϵ�y����ܛ���\�Эh������������Ɍ�5���΄�ģ�K�Ĺ����{�ȣ��Y��ϵ�y��Ӳ���O�䌍�F����ϵ�y�ĸ�헹��ܡ���������ģ�K����ϵ�y��һЩ���������������O���ӳ���Ĺ�����ϵ�yӲ����ʼ���O�õĹ����ȣ�����ͨ��ģ�Kؓ؟�����Ľ����Լ��m���Ĕ���̎�����\�ӿ���ģ�K�������a�\�㡢늙C�ļӜp�ٿ����cλ�ÿ��ƣ���ϵ�y���Ƶĺ��ģ��˙C����ģ�K����Һ���@ʾ���|����ݔ�˵ȣ����Ľ����OӋʹ�û���Qt��Ƕ��ʽ�D�Ύ��_�l����Qt/Embedded�������Ñ����ó���̓Ⱥ�֮�g��һ���D�Ύ��ܣ����˱��Cϵ�y�������ԣ��O����̎��ģ�K��������Լ�һЩ�����ա�
5��ģ�K֮�g��ͨ���c�{�Ⱦ��ڲ���ϵ�y�Ĺ�������ɡ�ϵ�y��Ҏ��ÿ��ģ�K��һ�����w���΄գ���ͨ�����f�ľ��̷�ʽ���M�̷�ʽ��Ƕ��ʽ����ϵ�y�����þ��ǛQ�����ض���ijһ�r��ϵ�y��ԓ�\����һ���M�̡�һ��ϵ�y�е��M����3�N��B���\�Р�B(Running)���;w��B(Ready)���ȴ���B(Waitting)���@Щ��B֮�g���ГQ��ͨ�^����ϵ�y�ṩ����Ϣ�C���T���]�䡢��̖������Ϣ��еȁ���ɣ�ģ�K֮�g���o������ϡ����ϵ�y���������p��ֻҪ���������΄����M��ģ�K�������c�h������Ɍ��Fϵ�y��ܺͶ��ӻ����Ķ�ʹϵ�y�����_���ԺͿɔU���ԡ�
�Ŀ��������ŷ��Ӄɂ��������ˬF�������D���_������ϵ�y�ĬF��������@Щ����ϵ�y�IJ��㣬�����һ�N�~��Ļ��ARM��Ƕ��ʽϵ�y����������ֱ��늙C����X��y�S����늙C�����s�������YԴ�����s��ԭ���ϣ��ɿ��Եõ����ƣ����ƾ��ȺͬF�����̶ȵõ������ߡ�
